
VL53L0X Time-of-Flight Sensor About Complete Guide for Electronics Projects
The VL53L0X Time-of-Flight Sensor is a compact, laser-ranging device designed for accurate distance measurement in robotics, IoT, and automation. This VL53L0X Time-of-Flight Sensor works on the principle of measuring how long infrared light takes to reflect from objects. Engineers prefer the VL53L0X Time-of-Flight Sensor because it provides precise readings up to 2 meters with millimeter accuracy. Whether you’re building robots, drones, or smart devices, the VL53L0X Time-of-Flight Sensor ensures reliable performance.
Unlike traditional ultrasonic or IR modules, the VL53L0X Time-of-Flight Sensor delivers fast and consistent results. Using the VL53L0X Time-of-Flight Sensor with Arduino or ESP32 is simple thanks to I²C communication. Learn the applications, wiring, and features of the VL53L0X Time-of-Flight Sensor. Get complete technical details on the VL53L0X Time-of-Flight Sensor and understand why it’s a preferred choice for modern electronics projects.
Introduction
In modern electronics, distance measurement plays a critical role in applications ranging from robotics and drones to IoT devices and automation systems. One of the most reliable and compact solutions available today is the VL53L0X Time-of-Flight Sensor. Developed by STMicroelectronics, this sensor leverages laser-based technology to achieve accurate and consistent distance measurement in a small package. Unlike ultrasonic or traditional IR sensors, the VL53L0X offers high precision, low power consumption, and simple integration with microcontrollers via I²C.
In this detailed guide, we’ll explore the working principle, features, applications, pinout, circuit diagram, and integration of the VL53L0X. We’ll also include a Bill of Materials (BOM), step-by-step setup instructions, FAQs, and authoritative references for further study.
Working Principle of Time-of-Flight (ToF)
The VL53L0X is a Time-of-Flight (ToF) distance sensor. ToF technology works by emitting a pulse of light (infrared laser in this case) towards an object and measuring the time it takes for the light to bounce back. Since the speed of light is constant, the distance to the object can be calculated precisely:
Distance=(Speed of Light×Time of Flight)/2Distance = (Speed\ of\ Light × Time\ of\ Flight) / 2
This method provides direct distance measurement, unlike ultrasonic sensors (which rely on sound waves) or infrared proximity sensors (which rely on reflected light intensity).
Features of VL53L0X Time-of-Flight Sensor
- Operating Voltage: 2.6V – 5V (typically 3.3V or 5V via breakout board regulator)
- Current Consumption: ~20 mA (active), few µA in standby
- Range: ~30 mm to 2000 mm (2 m) depending on object reflectivity
- Accuracy: ±3% error margin
- Interface: I²C (address: 0x29)
- Field of View (FoV): ~25°
- Response Time: Fast measurement up to 50Hz
- Size: Extremely compact (module ~4.4 × 2.4 × 1 mm)
- Additional Pins: Shutdown (XSHUT) and interrupt (GPIO1)
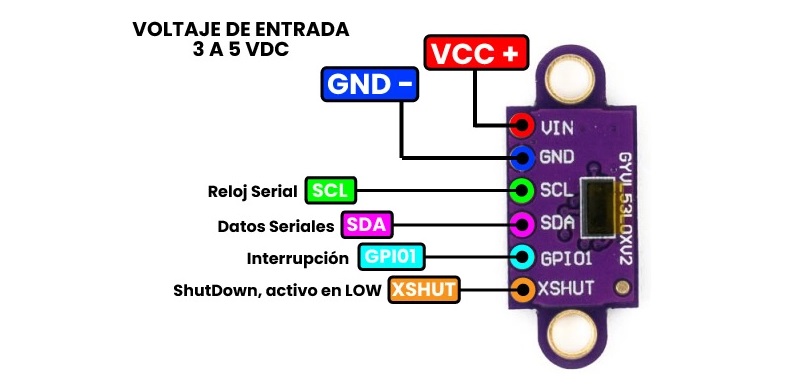
Pinout of VL53L0X
- VIN → Power supply input (2.8–5V)
- GND → Ground
- SCL → I²C Clock
- SDA → I²C Data
- XSHUT → Sensor shutdown/reset (optional)
- GPIO1 → Interrupt output (optional)
What is the Time-of-Flight Sensor VL53L0X?
The VL53L0X is a laser-based Time-of-Flight (ToF) distance sensor developed by STMicroelectronics. It measures how long it takes for a pulse of infrared light to travel to an object and back, giving highly accurate distance readings. It can detect distances up to 2 meters with millimeter precision, making it ideal for robotics, automation, and IoT projects.
What is the Time-of-Flight Sensor?
A Time-of-Flight sensor is a device that measures distance by calculating the time taken for a light signal (usually infrared laser) to travel to an object and reflect back. ToF sensors are widely used in:
3D cameras
Gesture recognition
Obstacle detection in robots and drones
Industrial automation
They are popular because they provide fast, accurate, and direct distance measurements.
What is the Time-of-Flight Distance Sensor VL53L4CX?
The VL53L4CX is an advanced version of the VL53L0X. It supports multi-target detection, a wider field of view, and a longer detection range of up to 6 meters. It’s used in more complex applications like smartphone 3D sensing, robotics navigation, and AR/VR systems.
How Accurate is the VL53L0X Sensor?
The VL53L0X sensor is quite accurate, typically within ±3% error margin under normal conditions. Accuracy depends on:
Surface reflectivity of the object
Ambient light conditions
Distance of measurement
For close-range measurements (under 1m), the accuracy is excellent, often within just a few millimeters.
What is the Maximum Distance for VL53L0X?
The maximum detection range of the VL53L0X is around 2 meters (2000 mm) under good lighting conditions. However, for darker or low-reflective surfaces, the effective range may be closer to 1.2–1.5 meters.
How Accurate are Time-of-Flight Sensors?
In general, Time-of-Flight sensors are very accurate. Most ToF sensors, including the VL53L0X, offer millimeter-level precision at close distances. Compared to ultrasonic or IR sensors, ToF sensors provide:
Better linearity
Higher accuracy
Faster response time
What is the Difference Between LiDAR and ToF?
LiDAR (Light Detection and Ranging) is a high-resolution system that uses lasers to build 3D maps of the environment. It’s more expensive and used in self-driving cars and surveying.
ToF sensors like VL53L0X are simpler, smaller, and cheaper, designed for short-range distance measurements.
In short, LiDAR is like a “professional 3D scanner,” while ToF sensors are “compact distance measurers.”
How Do You Know if a Sensor is Accurate?
To check accuracy, you can:
Compare the sensor reading with a known reference (e.g., a ruler or caliper).
Measure multiple times at the same distance and check consistency.
Test under different lighting and surface conditions.
Check the datasheet specifications for error tolerance.
What is the Alternative to the Time-of-Flight Sensor?
Alternatives include:
Ultrasonic sensors (HC-SR04) → Cheaper, good for longer ranges (up to 4m), but less accurate.
Infrared proximity sensors → Simple and cheap but less precise.
LiDAR modules (e.g., RPLIDAR, Garmin LIDAR-Lite) → More expensive, longer range.
Camera-based depth sensing → Useful for 3D mapping but requires complex processing.
Bill of Materials
| Component | Quantity | Description | Example Buy Link |
|---|---|---|---|
| VL53L0X ToF Sensor | 1 | Laser distance sensor module | ST VL53L0X Datasheet |
| Arduino Nano / Uno | 1 | Microcontroller for interfacing | Arduino Official |
| Breadboard | 1 | For circuit prototyping | Adafruit Breadboard |
| Jumper Wires | As req. | Male-to-male and female-to-male connectors | SparkFun Wires |
| 5V USB Power Supply | 1 | To power Arduino and sensor | Pololu Power Supply |
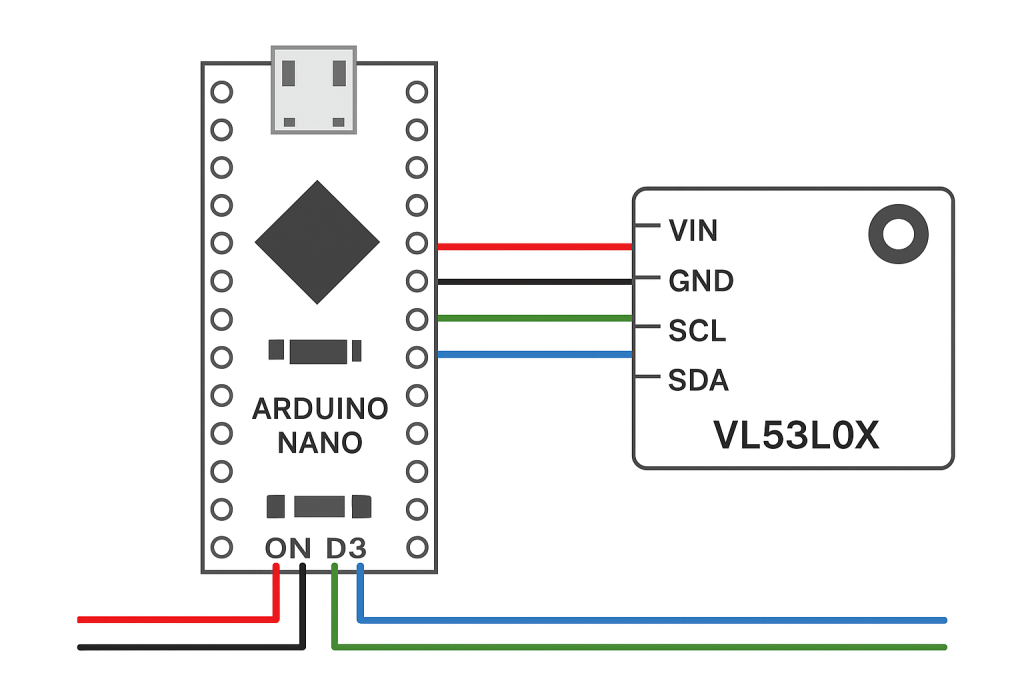
Circuit Diagram Explanation
The wiring between the VL53L0X and Arduino Nano is straightforward:
- VL53L0X VIN → Arduino 5V
- VL53L0X GND → Arduino GND
- VL53L0X SDA → Arduino A4 (I²C Data)
- VL53L0X SCL → Arduino A5 (I²C Clock)
- XSHUT & GPIO1 → Not connected (optional)
The I²C bus allows easy communication between Arduino and the sensor, with the default device address being 0x29. Multiple VL53L0X sensors can be connected to the same I²C bus by controlling their XSHUT pins.
Arduino Code Example
To use the VL53L0X with Arduino, you’ll need to install the Adafruit VL53L0X library or Pololu VL53L0X library from the Arduino IDE Library Manager.
#include <Wire.h>
#include <Adafruit_VL53L0X.h>
Adafruit_VL53L0X lox = Adafruit_VL53L0X();
void setup() {
Serial.begin(9600);
if (!lox.begin()) {
Serial.println("Failed to find VL53L0X sensor");
while (1);
}
}
void loop() {
VL53L0X_RangingMeasurementData_t measure;
lox.rangingTest(&measure, false);
if (measure.RangeStatus != 4) {
Serial.print("Distance (mm): ");
Serial.println(measure.RangeMilliMeter);
} else {
Serial.println("Out of range");
}
delay(100);
}
This sketch initializes the sensor, takes continuous distance measurements, and prints them to the Serial Monitor.
Applications of VL53L0X
- Robotics: Obstacle detection and navigation
- Drones: Altitude hold and collision avoidance
- IoT Devices: Smart lighting and proximity detection
- Gesture Recognition: Detect hand movements
- Liquid Level Detection: Measuring water or liquid levels in tanks
- Industrial Automation: Position sensing and object counting
Step-by-Step Guide to Using VL53L0X with Arduino
- Gather Components – VL53L0X sensor, Arduino Nano/Uno, jumper wires, breadboard, USB cable.
- Wire the Circuit – Connect VIN, GND, SDA, and SCL pins as explained above.
- Install Libraries – Open Arduino IDE → Sketch → Manage Libraries → Search for VL53L0X → Install Adafruit VL53L0X.
- Upload Example Code – Use the sample sketch provided.
- Open Serial Monitor – Set baud rate to 9600 and observe distance readings.
- Test Different Objects – Place objects at various distances and note accuracy.
FAQs about VL53L0X Time-of-Flight Sensor
Q1: What is the Time-of-Flight Sensor VL53L0X?
A: It is a compact laser-based sensor by STMicroelectronics that measures distance up to 2 meters with high accuracy.
Q2: What is the Time-of-Flight Sensor?
A: A ToF sensor measures distance by calculating the time taken for light to travel to an object and return.
Q3: What is the Time-of-Flight Distance Sensor VL53L4CX?
A: An advanced version supporting longer ranges (up to 6m) and multiple object detection.
Q4: How Accurate is the VL53L0X Sensor?
A: Typically within ±3% error, offering millimeter-level precision for short ranges.
Q5: What is the Maximum Distance for VL53L0X?
A: Up to ~2 meters, depending on surface reflectivity and lighting conditions.
Q6: How Accurate are Time-of-Flight Sensors?
A: Very accurate compared to ultrasonic/IR, offering fast, linear, and reliable results.
Q7: What is the Difference Between LiDAR and ToF?
A: LiDAR is for large-scale 3D mapping, while ToF sensors like VL53L0X are compact, affordable, and designed for short-range distance measurement.
Q8: How Do You Know if a Sensor is Accurate?
A: Compare its readings with a known reference and test under different conditions.
Q9: What is the Alternative to the Time-of-Flight Sensor?
A: Ultrasonic sensors, infrared sensors, LiDAR modules, or camera-based depth sensing.
Conclusion
The VL53L0X Time-of-Flight Sensor is a powerful and affordable solution for precise distance measurement in electronics projects. Its compact size, simple I²C interface, and reliable performance make it suitable for robotics, IoT devices, drones, and automation systems. Compared to traditional ultrasonic and infrared sensors, the VL53L0X provides superior accuracy and consistency. For projects requiring longer range or advanced features, sensors like the VL53L4CX offer an excellent upgrade path.
Whether you’re a beginner experimenting with Arduino or an engineer designing a smart device, the VL53L0X opens up countless possibilities for real-world applications.